

Die CeBIT 2017, die vom 20. bis 24. März in Hannover stattfand, hatte eine Vielzahl von Themen. Eines davon waren unbemannte Systeme im weiteren Sinne – und in diesem Rahmen wiederum insbesondere autonom fahrende Autos. Zu diesem Thema gab es auf der Digitalisierungsmesse jede Menge Einblicke in Ideen, Konzepte und ganz konkrete Umsetzungen. Die interessantesten Messefunde haben wir hier für Sie zusammengestellt.
Wer die CeBIT 2017 über den West-Eingang betrat, der das Messegelände Hannover an den zugehörigen ICE-Bahnhof anbindet, konnte das Spannungsfeld live erleben, in dem sich die traditionsreiche IT- und Digitalisierungs-Messe heute befindet: Die Digitalisierung macht die Stände kleiner, Aussteller sind heute zum Teil andere Unternehmen als früher – und so gibt es frei werdende Flächen, die die Messemacher dazu bringen, aus der Not eine Tugend zu machen: Halle 13, die noch vor Jahresfrist Netzwerk- und Sicherheitsfirmen beherbergte, war auf der CeBIT 2017 weitgehend leer. Doch hier zog dafür nun der autonome Kleinbus seine Runden, der sonst im schweizerischen Örtchen Sion beziehungsweise Sitten verkehrt.
Das auf zwei Jahre angelegte Erprobungsprojekt aus dem Wallis war für die Dauer der Messe nach Hannover verlegt worden und gab den Messebesuchern einen Eindruck davon, wie es sich anfühlt, in einem autonomen Bus chauffiert zu werden.

Das schweizerische Projekt ist einer der weltweit ersten öffentlichen Tests für autonomen öffentlichen Verkehr. Die bis maximal 30 km/h fahrenden Kleinbusse nutzen zwei Front-Lidar-Systeme, einen 360-Grad-Lidar sowie eine Laser-Stereokamera und ein von der ETH Laussanne entwickeltes Leitsystem, um in der Walliser Kleinstadt mit maximal 30 km/h Passagiere zu befördern. Ein Überwacher ist immer mit an Bord, doch er greift im Fall der Fälle nicht über ein Lenkrad, sondern über einen Controller ein, der fast an ein Videospiel erinnert. Oft muss er das nicht tun, denn die Kleinbusse verhalten sich maximal defensiv: Er stoppt sofort, wenn ihm ein Fußgänger oder anderes Fahrzeug zu nahe kommt. Die Weiterfahrt müssen nicht nur alle Sensorsysteme, sondern auch der menschliche Aufpasser gezielt freigeben. Dies bedingt allerdings auch einen Teil der bereits erzielten Lerneffekte aus dem Projekt: Die Autofahrer in Sion/Sitten haben sich so an die Rücksichtnahme der Busse gewöhnt, dass sie sie auch schon mal schneiden, gewagt überholen oder ausbremsen. Wie der autonome Bus auf diese Entwicklung reagieren soll, ist eine der Fragen, über die sich die beteiligten Ingenieure derzeit den Kopf zerbrechen.
Weiterer Schwerpunkt des Projekts ist die Entwicklung einer App, mit der Fahrgäste ihren Zustiegswunsch, -ort und -zeitpunkt signalisieren können. Wer im Bus einsteigt, gibt den gewünschten Zielort auf einem Tablet ein. Das Backend plant auf dieser Basis die optimale Route.
Supercomputer steuern Fahrzeugflotten
Wie ein ähnliches Konzept für Individualverkehr mit einer großen Anzahl von Fahrzeugen aussehen könnte, war eines der Themen, die Volkswagen an seinem CeBIT-Stand präsentiert. Die Idee: Supercomputer berechnen für jedes einzelne Fahrzeug einer Flotte die bestmögliche Route und Fahrstrategie, um das gewünschte Ziel nach Optimierungskriterien wie Fahrzeit, Energie- bzw. Kraftstoffverbrauch sowie Effizienz des Gesamtsystems zu erreichen. Einer der spannendsten Aspekte sind dabei Abwägung und Ausgleich der Interessen des einzelnen Fahrzeugs gegen Durchsatz und Effizienz des Gesamtsystems.

Auch beim Messeauftritt des Mobilfunkkonzerns Vodafone spielten vernetzte Fahrzeuge eine wichtige Rolle. Eine gemeinsam mit Audi und Huawei realisierte Demonstration auf der Freifläche vor dem Vodafone-Pavillon zeigte konkrete Anwendungen einer Vernetzungsplattform, die auf dem aktuellen Entwicklungsstand des Car-2-X-Funkverfahrens LTE-V basiert: Bei einer simulierten Kolonnenfahrt sahen die nachfolgenden Fahrzeuge das Frontkamerabild des ersten Autos in ihren Cockpits und schauten somit quasi durch die Kolonne hindurch. Die Herausforderung ist hier die vergleichsweise hohe Datenmenge des Kamera-Bewegtbilds.

Ein Notbremsassistent erhielt in Sekundenbruchteilen die Information, dass die voranfahrenden Fahrzeuge – in diesem Fall für einen Ball – die maximale Verzögerung einleiten. In der Messedemonstration lag die Latenz zwischen den Fahrzeugen bei etwa 50 Millisekunden. Ein weiterer Schwerpunkt war die Erkennung eines Fußgängers an schlecht einsehbarer Stelle. Unterstützt wurde die Erkennung durch das von der in der Simulation eingesetzten Puppe getragene Smartphone – das die Anwesenheit eines Besitzers per Car-to-X-Kommunikation kund tat.

Wer zusätzlich das Innere des Vodafone-Pavillons besuchte, konnte im Rahmen einer aufwändigen Virtual-Reality-Präsentation noch weiter in die Zukunft blicken: Hier zeigte der Netzbetreiber, wie er sich Verkehrsanwendungen der künftigen Mobilfunktechnik 5G vorstellt. Zu den eindrucksvoll visualisierten Konzepten zählten etwa eine ampellose Kreuzung, bei der sich alle Fahrzeuge im Millisekundenbereich über die Vorfahrt abstimmen, oder die Demonstration einer „Emergengy Trajectory Adaption“: In diesem Szenario steht ein defekter LKW auf der rechten Spur einer Autobahn, und die auf der linken Spur gewähren dem autonom in Reisegeschwindigkeit fahrenden Fahrzeug selbständig die nötige Lücke zum Spurwechsel, ohne dass eine Notbremsung erforderlich würde.
Auch Baden-Württemberg plant ein Testfeld
Zu den renommierten Ausstellern im „Public Sector Park“ der CeBIT zählten die einschlägigen Ministerien der Bundesregierung. Am Stand des Bundesministeriums für Verkehr und Digitale Infrastruktur stand das „Digitale Testfeld Autobahn“ im Vordergrund – der Abschnitt der deutschen Autobahn A9 zwischen München und Ingolstadt, auf dem Fahrzeughersteller, Netz- und Systementwickler Infrastruktur und Lösungen für autonomes Fahren testen können und dort unter anderem Zugriff auf eine 5G-nahe Mobilfunkinfrastruktur mit dem latenzverkürzenden Mobile Edge Computing zur Verfügung haben.

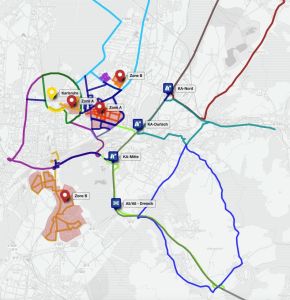
Interessante Nebenbeobachtung: Das Projekt ist offensichtlich so erfolgreich, dass das benachbarte Bundesland Baden-Württemberg auf der CeBIT sein eigenes Testfeld für autonomes Fahren ankündigte. Auf der Messe gab es dazu ein Modell zu sehen, das eine vernetzte Ampel mit zugehöriger „Roadside Unit“ demonstrierte. Doch bis 2019 soll die Testumgebung voraussichtlich im Großraum Karlsruhe in Betrieb gehen.
Partnerland der CeBIT 2017 war Japan, und so zählte zu den Ausstellern im japanischen Landespavillon unter anderem der Autohersteller Nissan. Er präsentierte eine Version seines Elektromodells Leaf, die mit „SAM“ ausgestattet war. Das Kürzel steht für Seamless Autonomous Mobility. Auch dahinter steht ein auf künstlicher Intelligenz basierendes Mobilitätskonzept, das laut Hersteller auf der Grundlage von NASA-Technologie entwickelt wurde. Dabei steht das Zusammenspiel mit dem Menschen im Vordergrund. Konkret basiert die Idee darauf, dass die autonom agierenden Fahrzeuge sich in kritischen Situation bei einem menschlichen Lotsen melden können, der in einer Verkehrszentrale sitzt und dem Fahrzeug dann konkrete Anweisungen gibt, wie es sich etwa an einem Hindernis vorbei bewegen soll. Ein anderthalbminütiges YouTube-Video stellt das Konzept vor:
IBMs Watson als virtueller Busfahrer
Zu den Highlights der CeBIT 2017 beim Thema autonomes Fahren zählte auch IBMs Watson-Technologie. Wie ihr Einsatz im Kontext autonomen Fahrens aussehen könnte, demonstrierte der IT-Gigant an seinem Messestand mit Hilfe des autonomen Kleinbusses „Olli“. Der kann bis zu zwölf Personen im städtischen Nahverkehr befördern und kommt dabei ohne Fahrer aus. Und genau dieser Umstand ist es, der nach den Überlegungen von IBM, den Einsatz von künstlicher Intelligenz erfordert: Watson dient bei „Olli“ nicht etwa zur Navigation oder Steuerung des von Local Motors entwickelten Kleinbusses, sondern konzentriert sich ganz auf die Interaktion zwischen Fahrzeug und Passagieren. Die Überlegung von IBM: Wo es keinen Fahrer mehr gibt, fehlt auch der Ansprechpartner für alle Fragen von der Fahrtrichtung über die richtige Haltestelle für den Ausstieg bis hin zu lohnenden Fahrzielen. So können die Passagiere Olli beziehungsweise Watson während der Fahrt etwa nach Restaurantempfehlungen oder nach anderen interessanten Orten befragen.

Womit am Ende dieses virtuellen Messerundgangs nicht nur ein innovatives Konzept für die wichtige Rolle eines Human-Machine-Interface auch im öffentlichen Personenverkehr steht. Sondern mit Olli auch ein weiterer sympathischer autonomer Kleinbus – was den Besucher zu der Erkenntnis führt, dass das autonome Fahren gerade im städtischen Nahverkehr schon sehr viel konkreter und realer ist als es mancher Interessent vielleicht erwartet hätte.