
Autonomes Fahren – intellektuelle und technologische Herausforderung. Oder einfach nur jede Menge Spaß? Dass Forschung im Bereich des autonomen Fahrens beides bedeuten kann, zeigt das Beispiel des NXP-Cups. Bei dem internationalen Studenten-Wettbewerb entwickeln Gruppen von Studierenden eigenständig kleine autonome intelligente Fahrzeuge. Diese sollen dann auf einer vorgegebenen Strecke einen Rundkurs in möglichst kurzer Zeit bewältigen. Forscher der Hochschule Düsseldorf gaben uns einen Einblick, worauf man bei der Teilnahme achten muss.
Im Jahr 2016 konnte das Team der Hochschule Düsseldorf (HSD) beim deutschen Vorentscheid des NXP-Cups den Sieg erringen und wurde bei der Europameisterschaft Dritter. Prof. Dr.-Ing. Bernhard Rieß vom Fachbereich Elektro- & Informationstechnik an der Hochschule Düsseldorf sowie die Studenten Dustin und Robin Braun demonstrierten ihr Fahrzeug und die Ausgangsbedingungen des Wettbewerbs im Rahmen der Fachmesse ConCar Expo 2016.
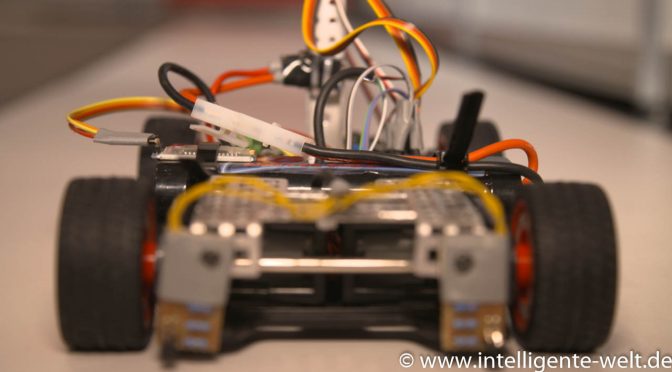
Autonomes Fahren im ganz kleinen Stil
„Die Bahn ist vorgegeben. Das sind sechs Strecken-Elemente mit 60 cm Breite und jeweils zwei, drei Zentimeter schwarzen Linien am linken und rechten Fahrbahnrand. Die restliche Fahrbahnoberfläche ist weiß. Die Strecke wird prinzipiell aus diesen sechs Elementen zusammengesetzt – aber die Zusammensetzung der Strecke bei den offiziellen Rennen ist den Studierenden vorher nicht bekannt“, erklärt uns Prof. Dr.-Ing. Bernhard Rieß. Bei den einzelnen Elementen kann es sich um gerade Strecken, starke Kurven, gerade Strecken mit kurvigen Rändern oder auch Abschnitte mit leichten Hügeln handeln. Das heißt, es gibt einige Herausforderungen zu bewältigen. Die Fahrzeuge müssen nicht nur eigenständig mit allen Streckenabschnitten, sondern gegebenenfalls auch mit durch die Beleuchtung auftretenden Schatten auf der Fahrbahn zurechtkommen.

Intelligente Fahrzeuge haben alles im Blick
Am Fahrzeug verbaut werden dürfen nur bestimmte vorgegebene Elemente. Mindestens zwei Kameras sind nötig, um die Aufgaben zu meistern. Wenn beispielsweise nach einem Hügel sofort eine Kurve folgt, muss das Auto diese Situation sehr schnell erkennen können und reagieren, sonst kommt es von der Fahrbahn ab. Dafür braucht es eine Kamera, die den Nah-Bereich direkt vor dem Fahrzeug im Blick hat, und eine weitere für den weiteren Streckenverlauf. Zur Unterstützung, etwa für die Zielerkennung, sind auch zwei Infrarotsensoren am Heck verbaut.
„Zuerst muss die Kamera das Ziel erkennen, und dann auch zusätzlich der Sensor, um eine 100-prozentige Sicherheit zu gewährleisten, dass da jetzt ein Ziel war.“
Robin Braun, Student, Hochschule Düsseldorf
Erste rollende Schritte in Richtung Zukunft
Derzeit haben die kleinen Fahrzeuge optisch noch recht wenig mit Transportsystemen für Menschen und Güter zu tun. Einige Aspekte, die im Rahmen des Wettbewerbs berücksichtigt werden müssen, dürften in Zukunft aber auch beim autonomen Fahren im Straßenverkehr eine Rolle spielen. So darf etwa die Fahrbahn nicht verlassen werden. Es muss vor Kurven rechtzeitig gebremst werden. Und die Zielerkennung könnte etwa für die Reaktion auf eine Stopp-Linie vor einer Ampel relevant sein. Den Forschern ist allerdings auch klar: Bis sie selbst am Ziel sind, ist es noch ein weiter Weg.
„Für uns war es erstmal ein Einblick, ein Einstieg in diese Thematik. Für den realen Straßengebrauch sind diese Systeme so erst mal natürlich nicht einsetzbar. Es ist eine Basis, auf die man aufbauen kann, die man mit weiteren Projekten anpassen könnte für den Straßengebrauch.“
Dustin Braun, Student, Hochschule Düsseldorf
Denn der reale Einsatz auf der Straße – vor allem im städtischen Bereich – beinhaltet deutlich mehr Herausforderungen als Kurven, Hügel und Schatten auf der Fahrbahn.
„Weitere zukünftige Entwicklungen wären dann, dass man auch bewegte Objekte wie Fußgänger erkennt, dass man andere Fahrzeuge oder Fahrradfahrer erkennen kann, dass man Hindernissen ausweichen kann, dass man Verkehrszeichen erkennen kann. Da ist der weiteren Forschung Tür und Tor geöffnet.“
Prof. Dr.-Ing. Bernhard Rieß, Hochschule Düsseldorf
Die ersten spielerischen Schritte in Richtung intelligente Fahrzeuge und autonomes Fahren sehen dennoch sehr vielversprechend aus. Wir sind gespannt auf die nächsten Entwicklungen und Projekte, die in den kommenden Jahren von Seiten der Hochschulen in Angriff genommen werden.