

Aufmacherbild: (C) Bosch und TomTom
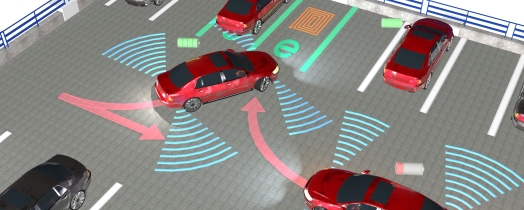
Kameras, Laser, Ultraschall und Lidar erfassen Signale über Objekte, die sich rund ums Auto befinden – andere Fahrzeuge, aber Streckenausstattungen wie Randbegrenzungen, Verkehrsschilder und vieles mehr. Im Abgleich mit hochpräzisen Kartendaten baut sich die Software eines automatisiert fahrenden Autos aus diesen Signalen ein Bild der digitalisierten Wirklichkeit. Diese „Umgebungsmodelle“ sind dann die Basis für Fahrentscheidungen des Systems – und sie gelten als Königsdisziplin bei der Entwicklung automatisierter Fahrfunktionen.
Das „Bild“, das sich die Software von der Umgebung des Fahrzeugs macht, ist naheliegenderweise für die Bedürfnisse der Algorithmen ausgelegt. Nachträgliche Visualisierungen bereiten diese Datenmodelle dann wieder für die Wahrnehmung und das Verständnis des Menschen auf – sei es für die Testingenieure oder im tatsächlichen Einsatz dann für den Fahrer. Da die Qualität der Fahrentscheidungen von der Präzision und Praxistauglichkeit der Umgebungsmodelle abhängt, sind sie Gegenstand intensiver Forschungs- und Entwicklungsarbeit.
Aus Laiensicht ist die Aufgabe für den Steuercomputer eines automatisiert fahrenden Autos einfach: Fahre auf der geplanten Wegstrecke und kollidiere dabei nicht mit anderen Fahrzeugen oder stehenden Hindernissen. Weiche aus, etwa durch einen Spurwechsel, wenn ein erkanntes Objekt sich zu langsam oder in falscher Richtung bewegt oder als stationäres Hindernis gar die Weiterfahrt auf der aktuellen Spur verhindert.
In der Realität ist diese Aufgabe jedoch wesentlich komplexer. Zum einen muss die Software exakt erkennen, worum es sich bei den von den Sensoren des Fahrzeugs erfassten Objekten handelt: Ist es ein anderes Fahrzeug? Wenn ja, welche Dimensionen hat es – Zweiradfahrer, Pkw, Lkw oder überbreiter Schwerlasttransporter? Handelt es sich bei dem neben der Straße stehenden Objekt um einen Fußgänger, der jederzeit loslaufen könnte? Oder um einen Baum, eine Mülltonne, ein geparktes Fahrrad?
Zum anderen handelt es sich beim Straßenverkehr, selbst auf den vergleichsweise „übersichtlichen“ Autobahnen und Landstraßen, auf denen es zumindest keinen Querverkehr und in der Regel auch keine Radfahrer und Fußgänger gibt, um hochdynamische Systeme. Erfahrene Autofahrer erfassen bestimmte Situationen mit einem Blick: Ein auf der rechten Spur fahrendes Fahrzeug nähert sich vergleichsweise schnell einem vor ihm fahrenden, deutlich langsameren Lkw. Da ist es wahrscheinlich, dass er – mit gesetztem Blinker oder ohne – gleich auf die mittlere Spur wechseln wird. Wer mit höherem Tempo auf der mittleren Spur fährt, tut gut daran, entweder seine Geschwindigkeit leicht zu verzögern oder – falls möglich – auf die dritte Spur zu wechseln. Solche „Fahrstrategien“ müssen Algorithmen erst mühsam lernen.
Und nicht einfacher wird diese Aufgabe mit Blick auf die Unterschiede in verschiedenen Ländern – so ist den USA „rechts überholen“ erlaubt und es gilt das Prinzip „Bleib möglichst auf Deiner Spur“ (Keep your lane). Hinzu kommen Besonderheiten durch Linksverkehr und andere regionale Eigenheiten.
Umgebungsmodelle als Forschungsschwerpunkt
Die entsprechende Programmierung und insbesondere das Finetuning von Umgebungsmodellen und Software findet natürlich in den Entwicklungsabteilungen der jeweiliger Autohersteller und ihrer „Tier 1″-Zulieferer statt – also der Zulieferer besonders hochwertiger und komplexer Systemkomponenten. Doch für Grundlagenforschung und Innovationen sind in erster Linie Hochschulen zuständig. Daher sind Umgebungsmodelle und in Software abgebildete Fahrstrategien zur Zeit der wohl wichtigster Forschungsschwerpunkt an Universitäten und Fachhochschulen, die sich mit Automobiltechnik, Mechatronik und verwandten Themen beschäftigen.

So beschäftigen sich beispielsweise im Forschungsbereich Fahrzeugsystemtechnik der Universität Duisburg-Essen Vorlesungen und Doktoranden mit vielen hochspezialisierten Aspekten dieser Fragestellungen: Car-to-X-Kommunikation, Strategien für Spurhalteassistenten, Simulationsmodelle für Verkehrsdynamik oder die automatisierte Bewertung von Fahrerassistenzsystemen sind nur einige aktuelle Beispiele der dort behandelten Schwerpunkte.
Auch im Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA gibt es einen Forschungsschwerpunkt „Fahrerassistenz und autonomes Fahren“. Das in Stuttgart ansässige Institut hat eine große Expertise in der Entwicklung mobiler Roboter, die ja ebenfalls ihre Umgebung über Sensorik wahrnehmen. Die daraus gewonnenen Erfahrungen nutzen die Wissenschaftler zunehmend auch im Automotive-Bereich. Denn auch hier stehen Funktionen wie Eigenlokalisierung, Umgebungserfassung mittels Sensordatenfusion sowie Bahnplanung und -regelung auf der Agenda. Dabei liegt ein besonderer Schwerpunkt auf prädiktionsbasierten Systemen – also Systemen, die ihre eigene Navigation auf Basis von Sensordaten, aber auch Informationen andere mobiler Systeme planen. Bei den eingangs skizzierten Aufgabenstellungen und Situationen liegt es nahe, dass sich die Zuverlässigkeit und Sicherheit automatisierter Fahrzeuge deutlich steigern lässt, wenn entsprechend ausgestattete Autos sich ihre Fahrabsichten gegenseitig digital mitteilen.
Enge Zusammenarbeit mit der Autoindustrie
Da das automatisierte Fahren als Schlüssel für die Zukunft der Automobilindustrie gilt, ist die entsprechende Grundlagenforschung Wegbereiter für einen Milliardenmarkt. Da überrascht es nicht, dass Hochschulen und Forschungseinrichtungen ihre Strukturen an die Anforderungen in diesem Bereich anpassen. So bündelten etwa Anfang 2016 die Universität Ulm, das Karlsruher Institut für Technologie (KIT) sowie das ebenfalls in Karlsruhe ansässige Forschungszentrum Informatik (FZI) ihre Kompetenzen im Bereich automatisiertes Fahren im „Tech Center a-drive“. Als Industriepartner ist außerdem die Daimler AG beteiligt, was eine rasche Umsetzung der Forschungsergebnisse in die Praxis ermöglichen soll.
Insgesamt wird das Tech Center a-drive mit 7,5 Millionen Euro gefördert: Die Daimler AG steuert 5 Millionen Euro bei, dazu kommen jeweils 1,25 Millionen Euro vom Ministerium für Wissenschaft, Forschung und Kunst sowie vom Ministerium für Finanzen und Wirtschaft des Landes Baden-Württemberg.

Die hier bearbeiteten Schwerpunkte liegen zum einen in der Technologie für hochautomatisierte und autonome Fahrzeuge, zum anderen bei der Schnittstelle zwischen Mensch und Technik. Die Robustheit der Wahrnehmungs- und Handlungsplanung automatisierter Fahrzeuge zu verbessern, ist nach eigener Angabe das Forschungsziel des Tech Center a-drive.
Wie wirken autonome und nicht-autonome Fahrzeuge zusammen?
Allerdings konzentriert sich die Forschung nicht nur auf die Frage, was an Bord eines automatisierten Autos passiert und wie solche Hightech-Fahrzeuge per Car-2-Car-Kommunikation mit ihresgleichen kommunizieren. Denn allen Beteiligten ist klar: Wenn die ersten selbstfahrenden Autos hochautomatisiert oder vollautonom über unsere Straßen rollen, werden sie sich den Verkehrsraum teilen müssen – mit „konventionellen“ Autos, die über gar keine automatisierten Fahrfunktionen und auf absehbare Zeit auch nicht über Car-2-Car-Kommunikationstechnik verfügen. Wohl noch sehr lange Zeit wird es einen hohen Anteil an Fahrzeugen geben, die von einem Menschen gesteuert werden.
Ein weiterer Forschungsschwerpunkt ist deshalb das Zusammenwirken autonomer und nichtautonomer Fahrzeuge. So beschäftigt sich etwa die Forschungsgruppe „Modellierung und Simulation“ am Lehrstuhl für Verkehrstechnik der TU München der TU München „mit der Analyse moderner Technologien im Bereich der Intelligenten Verkehrs- und Assistenzsysteme hinsichtlich ihrer Wirkungen auf die verschiedenen Verkehrsteilnehmer und den Gesamtverkehr“. Die Forschungsgruppe, die sich vor allem auf Modelle und Verfahren im Bereich der Verkehrssimulation konzentriert, berücksichtigt bei ihren Simulationen die Einflüsse der neuesten technischen Entwicklungen – etwa kooperativer Fahrzeuge, automatisierter Assistenzsysteme, intelligenter Infrastruktureinrichtungen und unterschiedliche Kommunikationsszenarien.
Die vorgestellten Beispiele zeigen deutlich: die Grundlagenforschung rund ums autonome Fahren spielt nicht nur eine entscheidende Rolle für die Entwicklungen in der Autoindustrie, sondern auch für die Fortentwicklung des Straßenverkehrs überhaupt. Und somit betrifft sie wohl so gut wie jeden von uns.